Perseverance procesa 64.000 comprobaciones de riesgo de colisión

MADRID, 13 (EUROPA PRESS)
El rover Perseverance de la NASA en Marte ha realizado más de 64.000 comprobaciones de riesgo de colisión durante su exploración en el cráter Jezero hasta el sol 460, o día marciano, de misión.
Todas fueron sin errores, informando de colisiones con antelación donde se esperaba, según ha revelado Vandi Verma, ingeniero jefe de operaciones robóticas en NASA/JPL, que diseñó y programó el software de vuelo Rover Collision Model, que detiene de forma autónoma cualquier actividad antes de que ocurra una colisión.
La comprobación de colisiones se realiza de forma autónoma a bordo y el equipo de operaciones normalmente no realiza ningún comando explícito, explica Verma en el blog de la misión. A menos que un movimiento falle en una verificación de colisión durante la simulación en tierra y deba ajustarse, es posible que el equipo de operaciones ni siquiera lo note.
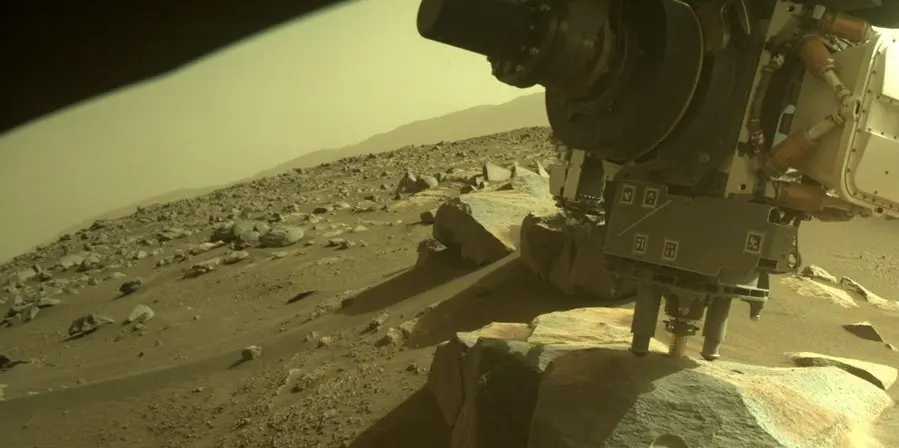
Perseverance tiene varias partes móviles, incluido el brazo robótico, el taladro, el mástil, las cubiertas de los instrumentos, la antena de alta ganancia y el sistema de movilidad. Una colisión no intencionada con el cuerpo del rover o el terreno marciano durante el movimiento podría causar daños irreparables.
Además, el instrumento SuperCam dispara el láser LIBS a la superficie para crear un plasma y realizar una espectroscopia, y también se trata de evitar que el láser destruya cualquier parte del rover.
Para evitar esto, Perseverance verifica los próximos movimientos y disparos láser utilizando este software de vuelo Rover Collision Model. Para realizar comprobaciones de colisión del brazo robótico, Perseverance proyecta el próximo movimiento del brazo y comprueba si en algún punto de ese movimiento colisionaría con el cuerpo del rover. Si el movimiento previsto no tiene colisiones inesperadas, permite iniciar el movimiento. A veces, el brazo necesita acercarse mucho al hardware o incluso tocar otras partes del cuerpo del rover, como durante el acoplamiento para intercambiar brocas o muestras de caché.
El rover sabe cuándo los contactos son intencionales y permite que ocurran. Cuando Perseverance selecciona de forma autónoma objetivos científicos a bordo utilizando AEGIS, utiliza el Rover Collision Model para filtrar cualquier objetivo que pueda provocar colisiones antes de seleccionar un objetivo para la orientación de SuperCam.